一、什么是线性代数
顾名思义,它是研究线性问题的代数理论。
代数英文是 Algebra,源于阿拉伯语,其本意是“结合在一起”的意思。也就是说代数的功能是把 许多看似不相关的事物“结合在一起”,也就是进行抽象。抽象的目的不是为了显示某些人智商高, 而是为了解决问题的方便,为了提高效率,把许多看似不相关的问题化归为一类问题。比如线性代数 中的一个重要的抽象概念是线性空间(对所谓的要满足“加法”和“数乘”等八条公理的元素的集合), 而其元素被称为向量。也就是说,只要某个集合里的元素满足那么几条公理,元素之间的变化满足这 些规律,我们就可以对这个集合(现在可以改名为线性空间了)进行一系列线性化处理和分析,这个 陌生的集合的性质和结构特点我们一下子就全知道了,因为宇宙间的所有的线性空间类的集合的性质 都一样,地球人都知道(如果地球人都学了线性代数的话)。多么深刻而美妙的结论!这就是代数的 一个抽象特性。
1.1 线性的意义
线性代数里面的线性主要的意思就是线性空间里的线性变换。
线性函数表现为直线,这只是几何意义。那么所谓“线性”的代数意义是什么呢?实际上,最基本 的意义只有两条:可加性和比例性。
可加性,和的函数等于函数的和。即如果函数\(f(x)\)是线性的,那么有: \[f(x_1 + x_2) = f(x_1) + f(x_2)\]
比例性,比例的函数等于函数的比例;或者说自变量缩放,函数也同等比例地缩放。也叫其次性、数乘性或均匀性,如果\(f(x)\)是线性,那么有: \[f(kx) = kf(x) , 其中 k 是常量。\]
💡 注:对于函数 \(f(x) = ax + b\) 而言不满足此比例性, \(f(kx) = akx + b\), \(kf(x) = akx + kb\)因此 \(f(kx) \ne kf(x)\)。严格的讲, \(f(x) = ax + b\) 不能再叫线性函数了。
可加性与比例性组合在一块就是“线性”的全部意义了,线性组合的函数,等于函数的线性组合。,即有: \[f(k_1x_1 + k_2x_2) = k_1f(x_1) + k_2f(x_2) , 其中 k_1, k_2 是常量。\]
线性函数的可加性表明函数所描述的事物具有累加性,所有起因的累加所导致的结果完全等于每 个起因独自所引起的结果的累加。
💡 注:线性齐次函数形如 $ y = k_1x_1 + k_2x_2 + ...k_nx_n $,这个正比例函数的式子中每项里的变量出现的次数都是一次的(没有常数项),整齐划一,故此称为“齐次”的,全称为 n 元线性齐次函数。
- 初等线性函数的自变量由一个数\(x\)拓展定义为一个竖排的数组\(\begin{pmatrix}x_1 \\x_2 \\ ...\\x_m\end{pmatrix}\), 因变量一个数\(y\)也拓展定义为一个竖排的数组\(\begin{pmatrix}y_1 \\y_2 \\ ...\\y_m\end{pmatrix}\), 这些 n元数组和 m元数组称之为列向量。
- 初等线性函数的比例系数\(k\)拓展为由所有的\(k_{ij}\)构成一个数的方针,称之为系数矩阵如下: > 因为 \(y_1 = kf(x_1)\) 的时候 \(k\), 虽为常量,枚举全则有 \(n\)个, 因此拓展为行 \(\begin{pmatrix}k_1 & k_2 & ...& k_n\end{pmatrix}\)。 再随着\(x, y\)拓展, 因此拓展为\(mn\)系数矩阵。
\[\begin{bmatrix} k_{11} & k_{12} & ...... k_{1n}\\ k_{21} & k_{22} & ...... k_{2n}\\ ... & ... & .......... \\ k_{m1} & k_{m2} & ...... k_{mn}\\ \end{bmatrix}\]
- 然后定义一种系数矩阵与向量相乘的运算法则:
矩阵运算顺序,由左向右。
\[\begin{pmatrix}y_1 \\y_2 \\ ...\\y_m\end{pmatrix} = \begin{bmatrix} k_{11} & k_{12} & ...... k_{1n}\\ k_{21} & k_{22} & ...... k_{2n}\\ ... & ... & .......... \\ k_{m1} & k_{m2} & ...... k_{mn}\\ \end{bmatrix} \begin{pmatrix}x_1 \\x_2 \\ ...\\x_m\end{pmatrix} \]
- 进一步简写为:y = f(x) = Kx ,其中: \[ y= f(x) = \begin{pmatrix}y_1 \\y_2 \\ ...\\y_m\end{pmatrix}, K = \begin{bmatrix} k_{11} & k_{12} & ...... k_{1n}\\ k_{21} & k_{22} & ...... k_{2n}\\ ... & ... & .......... \\ k_{m1} & k_{m2} & ...... k_{mn}\\ \end{bmatrix}, x = \begin{pmatrix}x_1 \\x_2 \\ ...\\x_m\end{pmatrix} \]
多元线性函数的几何意义
一元线性函数 $ f(x) = kx $, 拓展到二元线性函数 $ f(x_1,x_2) = k_1x_1
+ k_2x_2$ 1. 坐标系由二维拓展为三维:\(f(x) =
kx\)
的直线图形是在二维笛卡尔坐标下的几何图形,放到三维笛卡尔坐标系下,应写为
\(f(x_1, x_2) = k_1x_1\), 或者$ f(x_1,
x_2) = k_2x_2$, 取 $ f(x_1, x_2) = k_1x_1$ 为$ f(x) =
kx$的拓展维表达式。 > 一元只有一个变量, $ f(x) = kx$表达式, 简单来说
一元是二元的其中一个元为0的特例。
\(f(x1, x_2) =
k_1x_1\)的图形是过原点的平面。也就是说拓维后由一条直线变成了一个平面。这是因为函数
$ f(x_1, x_2) = k_1x_1$ 与新生长出来的坐标轴\(x_2\)没有关系,\(x_2\)可以取任意值;换句话说, \(x_2\)的任意值都在函数 \(f(x1, x_2) =
k_1x_1\)的图像上。进一步说,这是一个过 \(x_2\)坐标轴的平面 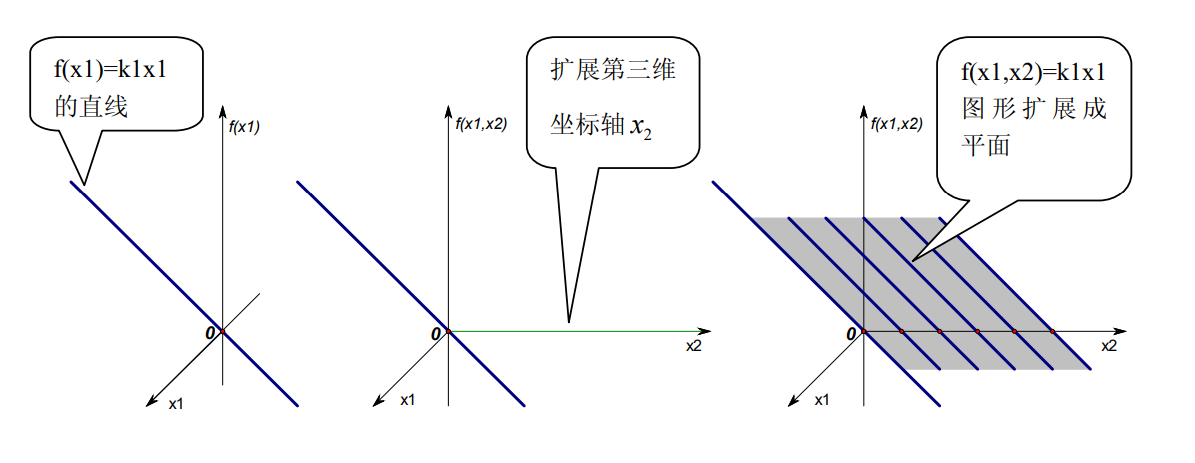
- 两个平面加起来,显然要得到函数$ f(x_1,x_2) = k_1x_1 +
k_2x_2$的图形,只要把三维坐标系下的两个函数 \(f(x_1,x_2) = k_1x_1\) 和 \(f(x_2,x_2) = k_2x_2\)
所对应的平面加起来即可得到。一般情形下,两个平面相加仍然是一个平面
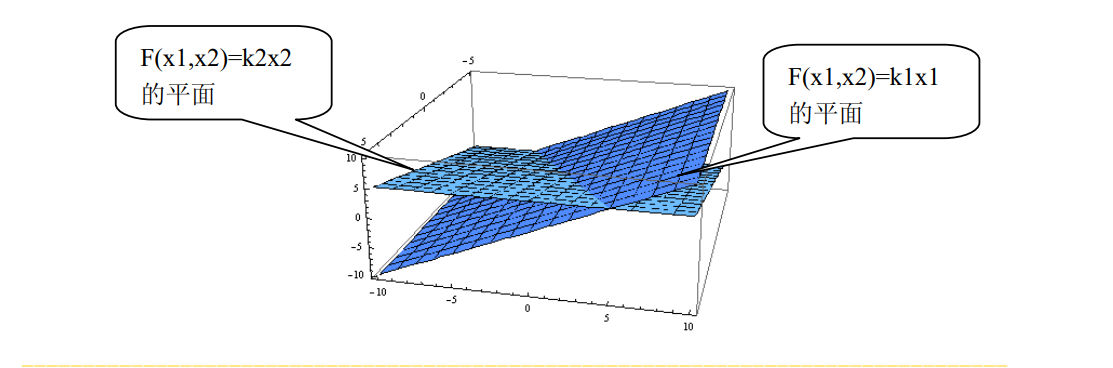
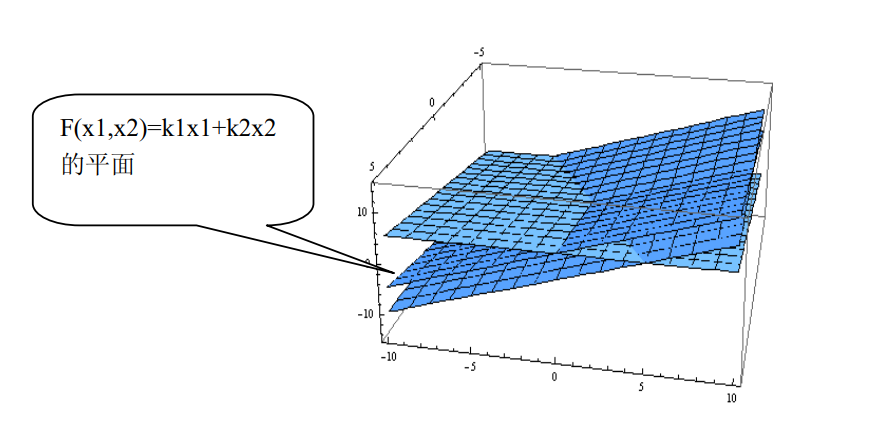
因此,线性函数 \(f(x_1,x_2) = k_1x_1 + k_2x_2\)的几何图形是一个过原点的平面。
可以想象,由二元线性函数 \(f(x_1,x_2) = k_1x_1 + k_2x_2\) 继续扩展到三元及n元的线性函数 \(f(x_1,x_2...,x_n)= k_1x_1 +... k_nx_n\)(坐标系由三维扩展到四维及其 n 维)后,其几何图形仍然是 一个“平面”,是一个扩展意义上的平面,常被称为超平面。
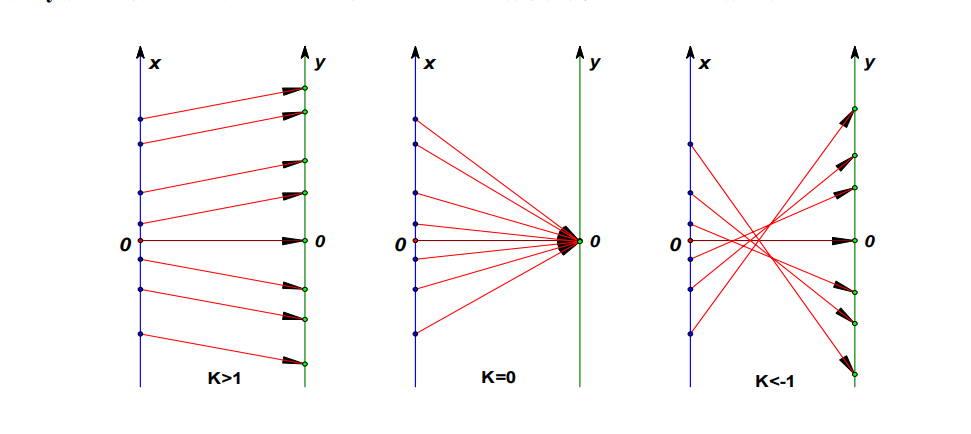
1.2 线性映射或变换的几何意义
线性映射的几何意义
实际上,我们可以引入一种运动的思想,把函数看成一种变换,一种映射,一种从自变量的集合 对应变换到因变量的集合的瞬间过程。
要在这里加入变换或映射的动作(注意:是动作,一个瞬时的变化动作,只有开始和结果),并
突出表达这种变换和投射的关系,我们把表达式 \(f(x) = kx\) 改写成 $T: xy , xkx, T:xy $
表示为一个从自变量数的集合 x 到因变量数的集合 y的映射,$xkx
$表示两个集合里的自变量x到因变量 y之间具体的对应变换关系。 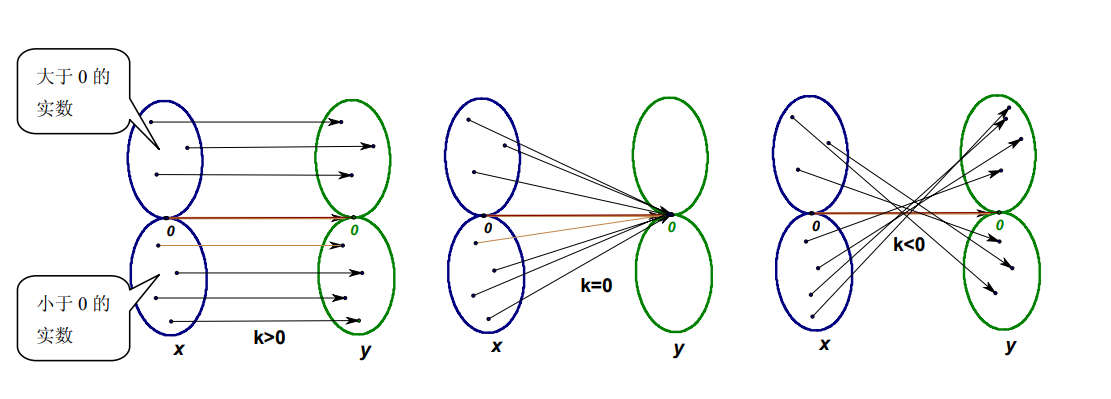
https://www.bilibili.com/video/BV1aW411Q7x1?spm_id_from=333.337.search-card.all.click&vd_source=443df192bfbb2c7e241ddc52ed45ecd8
行列式由来
解方程组 $$ { \[\begin{array}{c} 5x+6y = 7 & ① \\ 9x+4y = 3 & ② \\ \end{array}\] . \ 消元 { \[\begin{array}{c} ① * 4 - ② * 6 消除y \\ ② * 5 - ① * 9 消除x \\ \end{array}\].
整理
{ \[\begin{array}{c} x = \frac{7 *4 - 3 *6}{5 * 4 - 9 *6}\\ \\ y = \frac{3 *5 - 7 *9}{5 * 4 - 6 *9}\\ \end{array}\]. $$
根据行列式的定义。 交叉相乘后相减: 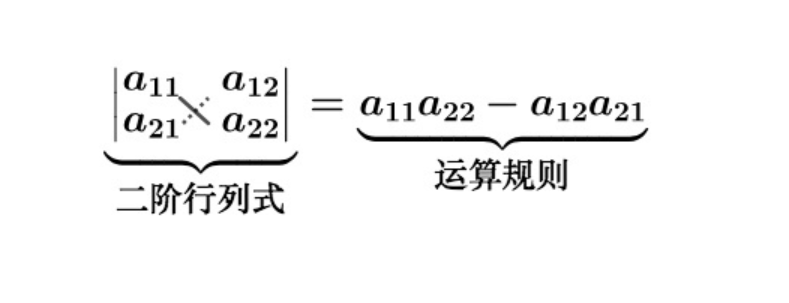
则转换成新运算行列式: \[
\left \{
\begin{array}{c}
5x+6y = 7 \\
9x+4y = 3 \\
\end{array}
\right.
\Rightarrow
\left \{
\begin{array}{c}
x = \frac{7 *4 - 3 *6}{5 * 4 - 9 *6}\\
\\
y = \frac{3 *5 - 7 *9}{5 * 4 - 6 *9}\\
\end{array}
\right.
\Rightarrow
\left \{
\begin{array}{c}
x = \frac{ \begin{vmatrix}
6 & 7 \\
4 & 3
\end{vmatrix}
}
{
\begin{vmatrix}
6 & 5 \\
4 & 9
\end{vmatrix}
}
\\
\\
y = \frac{ \begin{vmatrix}
5 & 7 \\
9 & 3
\end{vmatrix}
}
{
\begin{vmatrix}
5 & 6 \\
9 & 4
\end{vmatrix}
}
\end{array}
\right.
\]
线性代数简明教程
行列式意义是值形态, 长度,面积,体积的变换。 矩阵意义是形态变换, 运动后的同形态表示。

